Copyright © 2026 Bill Yen.
youBot Control System
Robust Trajectory Generator for a Virtual Robot
About:
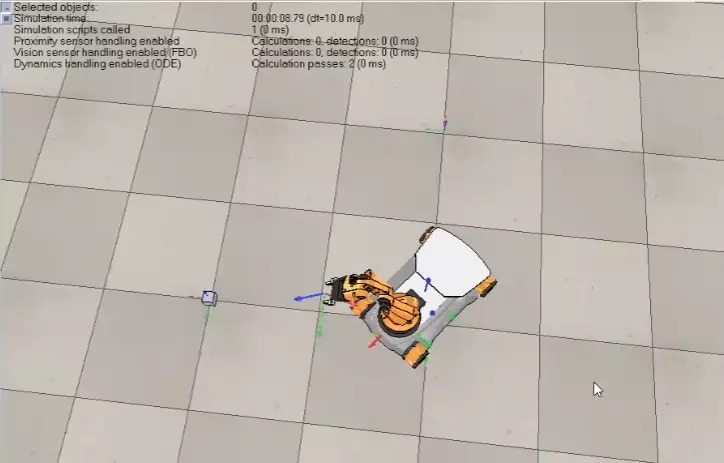
I built the youBot Control System for Northwestern University’s Robotics Manipulation (MECH_ENG 449) capstone assignment, and the project entails generating the trajectory for a mobile 5R robot with four mecanum wheels (the youBot) to complete the task of picking up a cube at a certain location and dropping it off at another. Through working on this assignment, I gained practical experience with robotic simulations and closed-loop controls. I also strengthened my computational ability by applying linear algebra concepts to calculate the desired motion of each component on the robot given certain initial and final conditions.