
Copyright © 2026 Bill Yen.
Smartphone Sensor Projects
Signal Processing and Sensor Systems for Consumer Devices
About:
As part of Stanford's Understanding the Sensors in Your Smartphone course, I designed and validated three sensing systems commonly used in modern consumer devices: inertial sensing, capacitive touch sensing, and photoplethysmography (PPG). These projects emphasized end-to-end sensor pipelines, from physical transduction and noise modeling to signal processing and real-world validation.


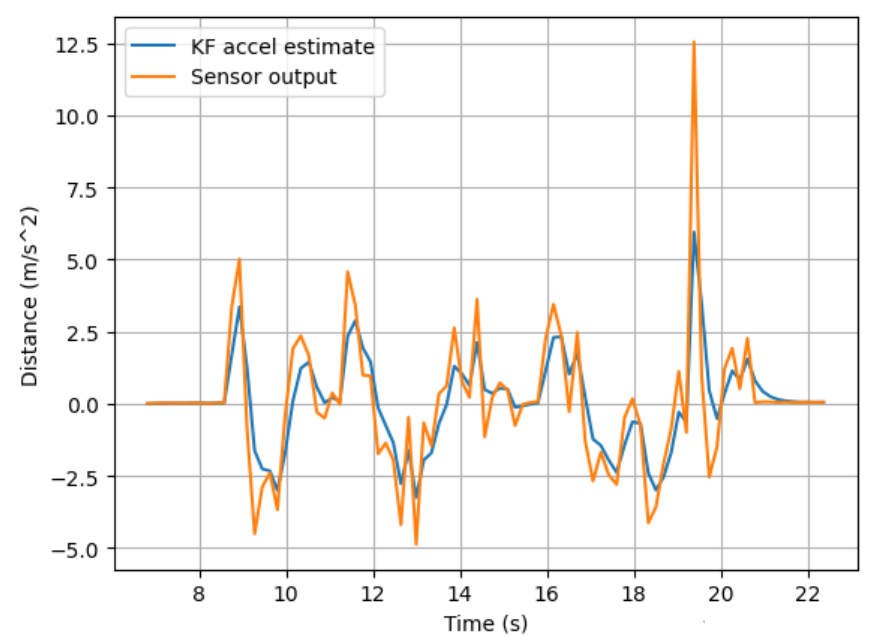
IMU Position Tracking
We explored inertial sensor fusion using accelerometer and gyroscope data collected on a Raspberry Pi platform. A complementary filter was implemented to estimate tilt, revealing how accelerometer bias, gyroscope drift, sampling rate, and integration error impact orientation accuracy. A Kalman filter–based state estimator was then developed to track position from acceleration measurements, including calibration to remove gravitational leakage and tuning of process and measurement noise. Allan deviation analysis was used to characterize sensor noise regimes (white and 1/f noise) and relate them to real-world limits in drift and position estimation.
CDMA-Based Capacitive Touch Sensing
We designed a capacitive touch-sensing system using pseudorandom binary sequence (PRBS) modulation across five drive lines and seven sense lines. By applying Code Division Multiple Access (CDMA) techniques, the system achieved robust touch localization and noise rejection, and was validated in hardware using a custom capacitive touch pad.
Photoplethysmography (PPG) Signal Processing
We built a signal-processing pipeline for a PPG sensor using FFT-based spectral analysis and peak detection to extract heart rate variability, beats per minute, and post-exercise recovery time constants, and analyzed performance non-idealities arising from sensor placement and user motion using real physiological measurements collected after exercise across multiple wrist and finger positions.
